Есть ли мат аппарат для построения линейной интерполяции с подвижными концами?
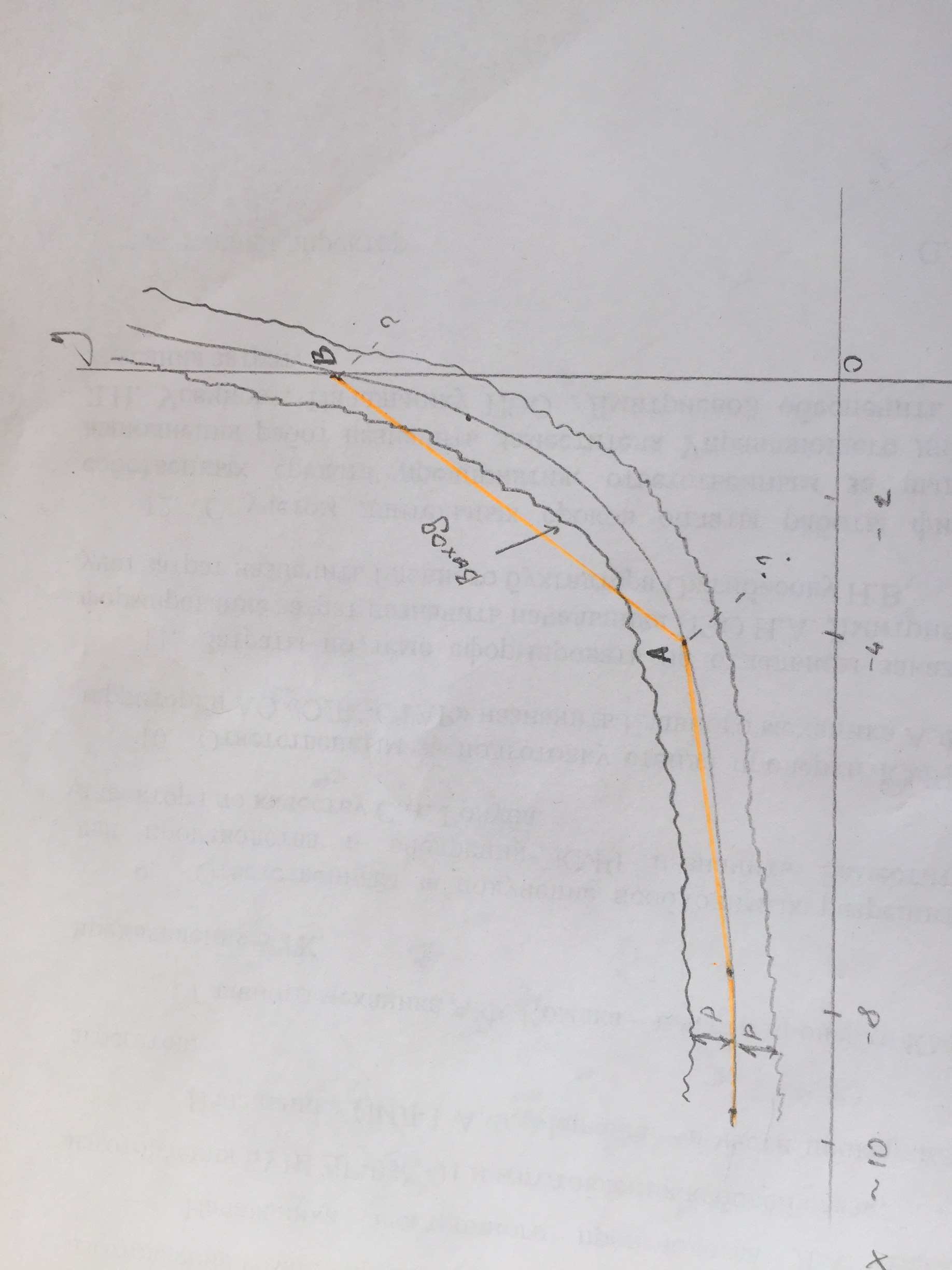
Добрый день! Есть график функции описывающий некий процесс. Есть линейный регулятор. Взяв несколько точек графика, используя линейную интерполяцию, можно получить график работы регулятора. Но есть одна проблемка ... На графике процесса есть допустимые погрешности за которые нельзя выходить, график представляет из себя грубо "гиперболу". Соответственно в местах перегиба прямая соединяющая две точки выходит за диапазон. Решением, очевидно, является корректировать значение узлов интерполяции (значение х и у), чтобы получившаяся прямая не выходила за допустимые значения. Есть ли какой то подход для решения такой задачи? Спасибо