Подозреваю, что есть прямая связь между состоянием ДО (тело и ноги под углом 90 гр. по отношению друг к другу) и ПОСЛЕ (тоже тело и ноги под углом 90 гр., но уже в другую сторону)
нет.
Есть функция Vector2.SignedAngle, которая возвращает угол между двумя векторами. Причём эта версия Возвращает значения от -180 до 180. В зависимости от того значение меньше или больше нуля вам и нужно поворачивать направо или на лево, если вообще нужно поворачивать. И вот это "нужно ли поворачивать" - это вовсе не "угол равен 0", а какие-то небольшие отклонения от нуля.
По сути, и без кода я уже написал весь ваш код. Так что уделяйте больше времени чтению документации. Вам сказали, что тут векторная математика, а значит идёте и исследуете документацию по Vector2
Zefirot,
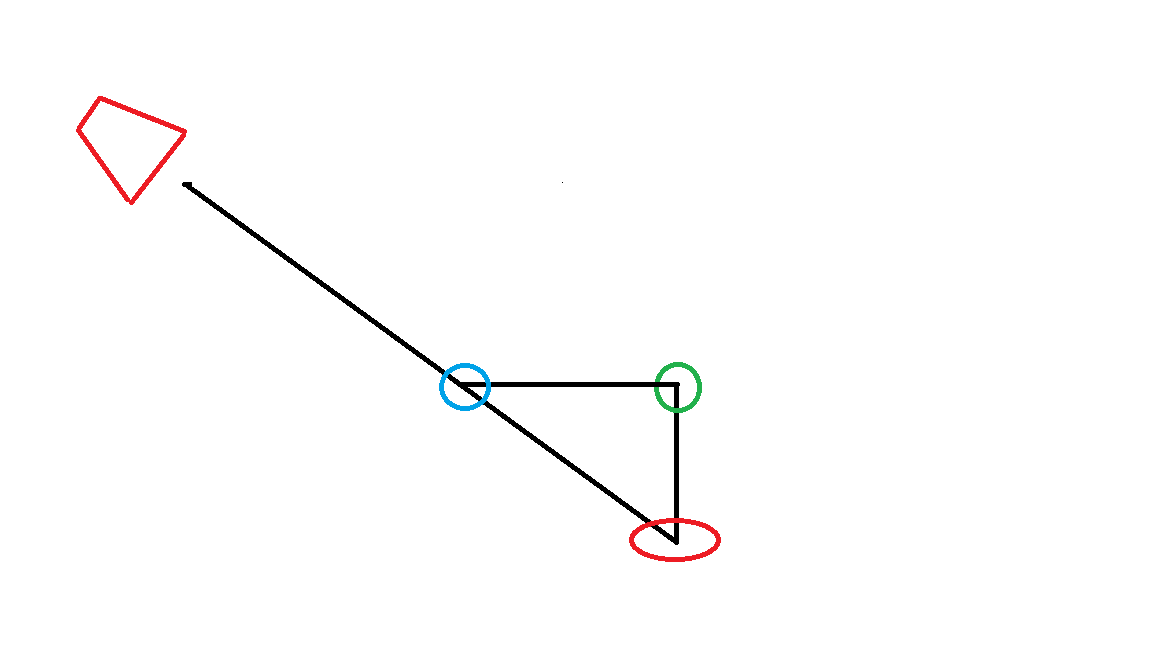
Красный круг - точка, где пересекается луч из камеры с землёй. Зелёный круг- точка Y+80, то есть куда сейчас направляется прицел. Синий круг - точка, куда вам нужно направить прицел, чтоб всё выглядело корректно. А это уже чисто математическая задача. Решайте. Саму проблему я вам уже решил.
ProgrammDevel, нет правда, это же задачка уровня Hello, world. Я не особо люблю говорить людям подобные вещи, но если ты даже это не в силах сам сделать, то лучше сразу бросить эту затею.
Zefirot, думаю, это происходит из-за того, что отпускании кнопок, одна отпускается позже и считается, что вы пытаетесь смотреть в эту одну сторону. Без заглядывания в сам проект не смогу ничего подсказать.