Здраствуйте. У меня есть Обьект, допустим, " Вилка". Я знаю ее начальные координаты. Положение и матрицу поворота.
Потом я ее повернула и тоже знаю конечные результаты и rotation matrix.
Как найти теперь на сколько градусов была повернута вилка в euler angle.
Я считаю как на картинке.
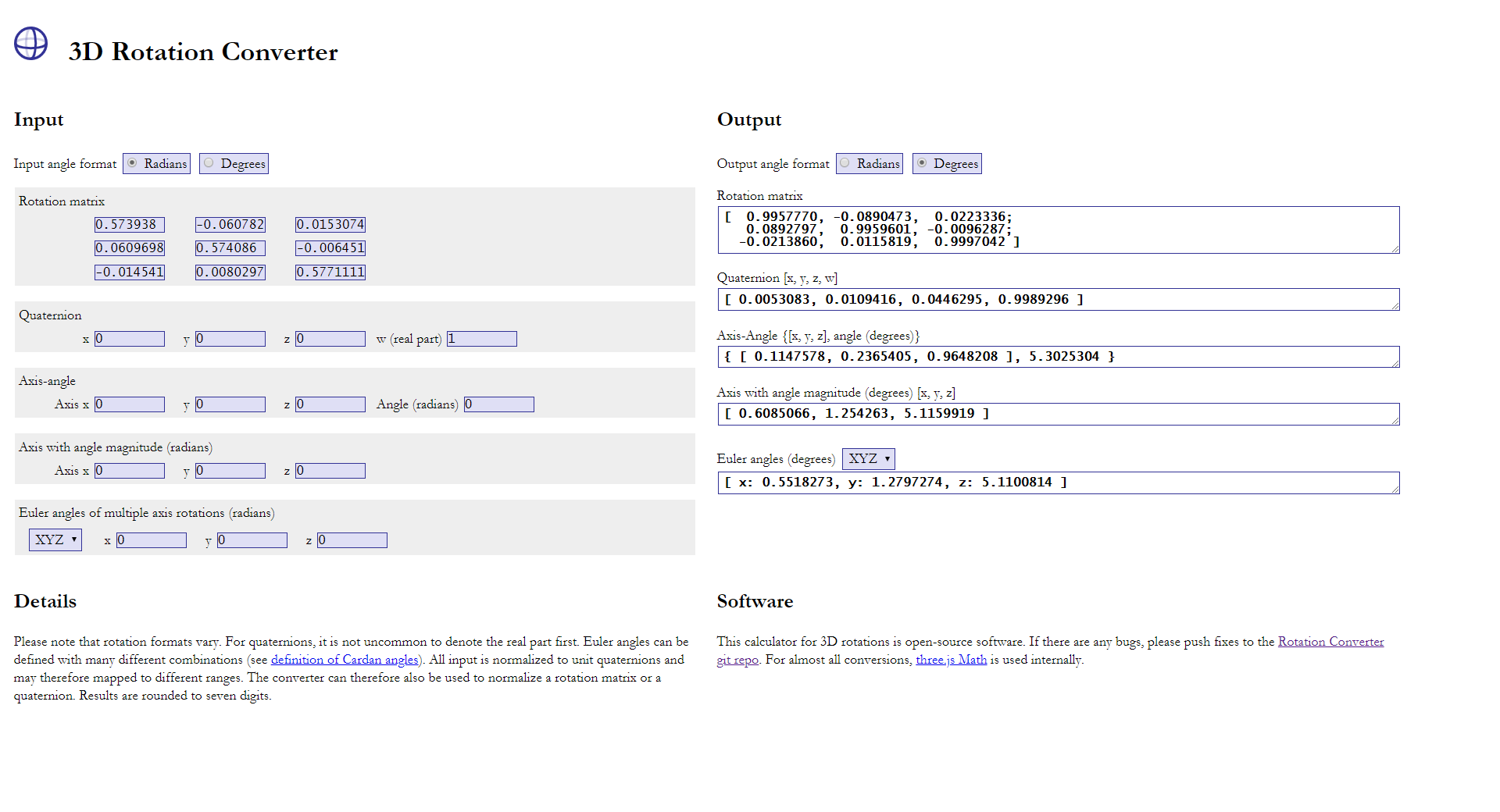
Вышла матрица X. Ее я вставила в конвертер. На этом сайте.
https://www.andre-gaschler.com/rotationconverter/
Выходят хорошие углы, реальные. Но как конвертер считает вторую матрицу поворота? То есть слева..
Или я вообще все делаю не правильно?
Помогите пожалуйста.

Матрица Вилки А
[ 0.186812, -0.908758, 0.373175;
-0.954698, -0.0783737, 0.287069;
-0.231629, -0.409897, -0.882231]
Матрица Вилки B
[ 0.291274, -0.888062, 0.355676;
-0.933193, -0.181957, 0.309906;
-0.210498, -0.422182, -0.881733]

