Имеем электронно-механическую систему:
1) коллекторный двигатель (220В) с редуктором (ременная передача 1:19)
2) электронный блок управления на базе МК (управление двигателем ФИ, т.е. МК отслеживает переход сетевого напряжения через ноль и в нужный момент дает управляющий сигнал на открытие симистора и соответственно включение двигателя). От двигателя есть обратная связь в виде тахогенератора.
Задача разогнать нагрузку и двигатель до определенной скорости после чего плавно ее наращивать.
К примеру раскрутить нагрузку до 60об/минуту за короткий промежуток времени (примерно 30сек) (назовем этот 1 этап), после чего поднимать обороты до 80об/минуту в течение 2х минут (скажем от 60 до 80 увеличение линейное) (назовем это 2 этап), после чего следует остановка - назовем все этот процесс "цикл" или "запуск".
По такому же принципу еще цикл от 80 до 100, и от 100 до 120.
Так вот, система эта жутко инертная и по понятным причинам не может мгновенно выйти на начальную рабочую скорость. Более того, на двигатель нельзя подавать максимальную мощность на низких оборотах, ремень начинает проскальзывать. Есть еще момент НАЧАЛЬНАЯ нагрузка может быть разная, ну т.е. она варьируется от "цикла/запуска" к "запуску" и еще после запуска нагрузка уменьшается (скорость уменьшения нагрузки также не известна и все время варьируется) .
Судя по всему в данном случае разумно использовать ПИД (PID) для управления в качестве алгоритма. Поискал, почитал как вообще настраивать этот ПИД? Есть несколько источников где это описано (довольно абстрактно), но вот в них ничего не написано про условия. Как в данном случае быть? Все источники что я читал описывают процесс достижения некой конечной/стабильной цели/значения как то температуры или скорости. Будет ли ПИД стабильно работать при таких условиях если его настроить один раз для режима 1 без нагрузки?
Есть тут специалисты кто в своей практике сталкивался с настройкой ПИД?
Вот собственно несколько графиков для описанной системы:
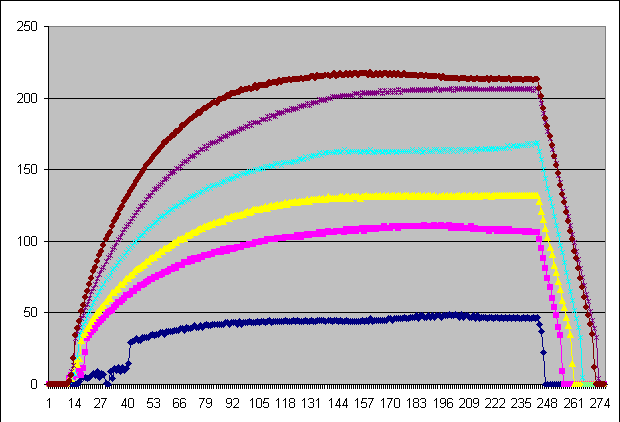
Это сигналы с тахометра, 6 полных циклов запуск/остановка.
В данном случае нет никакого ПИДа, есть только ФИ регулятор, установленный после подачи питания в некое постоянное значение, т.е. по сути для каждого отдельного графика мощность постоянна (но для каждого она своя).
Количество импульсов тахометра двигателя замеряется дважды в секунду.
Как видно сигнал с тахометра довольно стабильный (за исключением первых 20секунд/40точек на нижнем синем графике, в силу очень низких оборотов) и его можно даже не усреднять.
Еще довольно интересные моменты:
1) после отключения подачи питания на двигатель скорость падает практически линейно
2) набор скорости продолжается примерно около минуты, после чего может быть небольшая просадка, особенно это заметно на нижнем графике, с чем это связано не совсем понятно, возможно небольшие изменения напряжения в электросети.
Да и это на холостом ходу.
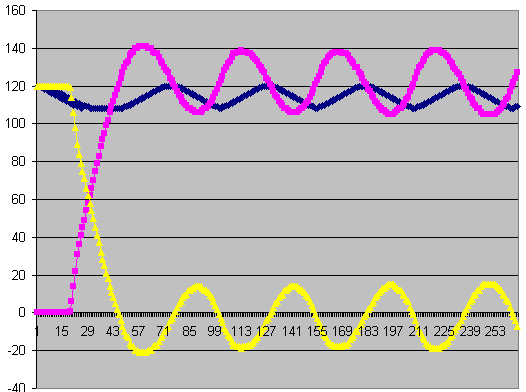
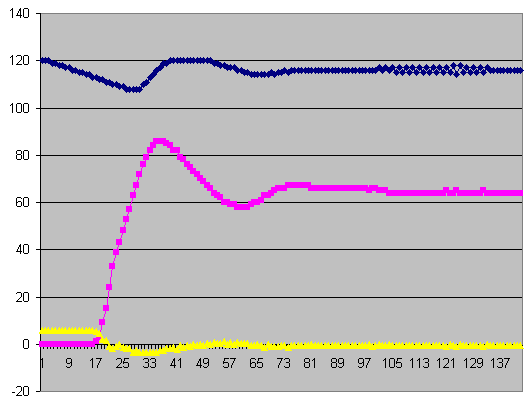
Еще график, как это было, управление (синий график) + скорость с тахометра (розовый)

Здесь все 6 циклов, направление вращения двигателя чередуется, видно отношение управления и реакции на него. После подачи питания сигнал управления плавно уменьшается от 120 до 114,112,110,108. Нужно заметить, что двигатель обладает разным крутящим моментом в зависимости от направления вращения, поэтому при одинаковом управляющем значении, получаются разные скорости!