Взял реализацию фильтра Калмана из этих статей:
https://clck.ru/FSbT2, https://habr.com/ru/post/166693/
В моей задаче в условии дан сигнал, который выглядит следующим образом:
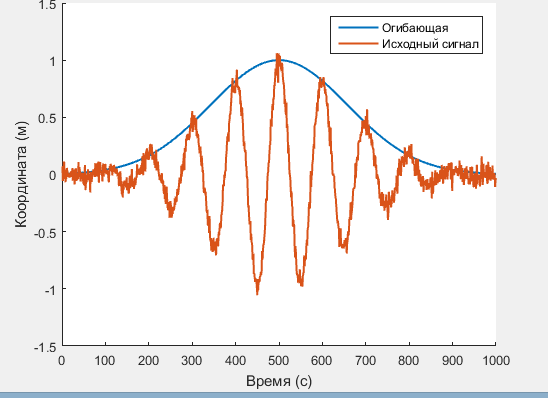
for x = 1:N
A(x) = exp((-(x-500)^2)/50000);
y(x) = A(x)*cos(2*3.14*0.01*x)+normrnd(0,sigmaPsi);
end
После применения фильтра Калмана получился результат, практически повторяющий исходный сигнал (как в задаче из вышеуказанных источников):
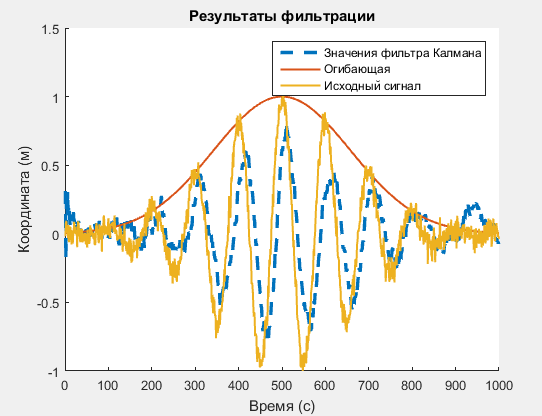
Мне же нужно, чтобы график фильтра Калмана был наиболее близок не к исходному сигналу, а к его огибающей. Соответственно, нужно немного поменять сам алгоритм фильтра Калмана:
for t=1:(N-1)
eOpt(t+1)=sqrt((sigmaEtaFilter^2)*(eOpt(t)^2+sigmaPsi^2)/(sigmaEtaFilter^2+eOpt(t)^2+sigmaPsi^2)); %минимизация значения ошибки
msum = msum + eOpt(t+1);
sum = sum + (eOpt(1))^2;
K(t+1)=(eOpt(t+1))^2/sigmaEtaFilter^2; %выражение для ошибки
xOpt(t+1)=(xOpt(t))*(1-K(t+1))+K(t+1)*z(t+1);
end;
Как это можно сделать ? Долго пытаюсь разобраться, но пока безрезультатно.
Код программы :
N = 1000;
sigmaPsi=0.05; %реальные погрешности (ошибка модели)
sigmaEtaModel=0.5; %ошибка измерений прибора
sigmaEtaFilter = 0.8;
k=1:N;
x=k;
for x = 1:N
A(x) = exp((-(x-500)^2)/50000);
y(x) = A(x)*cos(2*3.14*0.01*x)+normrnd(0,sigmaPsi);
z(x)=y(x)+normrnd(0,sigmaEtaModel);
end
%kalman filter
xOpt(1)=z(1); %хорошее приближение для истинной координаты
eOpt(1)=sigmaEtaFilter; %дисперсия
msum = eOpt(1);
sum = (eOpt(1))^2;
for t=1:(N-1)
eOpt(t+1)=sqrt((sigmaEtaFilter^2)*(eOpt(t)^2+sigmaPsi^2)/(sigmaEtaFilter^2+eOpt(t)^2+sigmaPsi^2)); %минимизация значения ошибки
msum = msum + eOpt(t+1);
sum = sum + (eOpt(1))^2;
K(t+1)=(eOpt(t+1))^2/sigmaEtaFilter^2; %выражение для ошибки
xOpt(t+1)=(xOpt(t))*(1-K(t+1))+K(t+1)*z(t+1);
end;
sr = msum/N;
vdisp = sum/N - sr^2;
hold all;
plot(k,xOpt,'--','linewidth',2.5);
plot(k,A,'linewidth',1.5);
plot(k,y,'LineWidth',1.5);
title('Результаты фильтрации');
xlabel('Время (с)');
ylabel('Координата (м)');
legend('Значения фильтра Калмана', 'Огибающая','Исходный сигнал');


 Простой
Простой





