Всем привет.
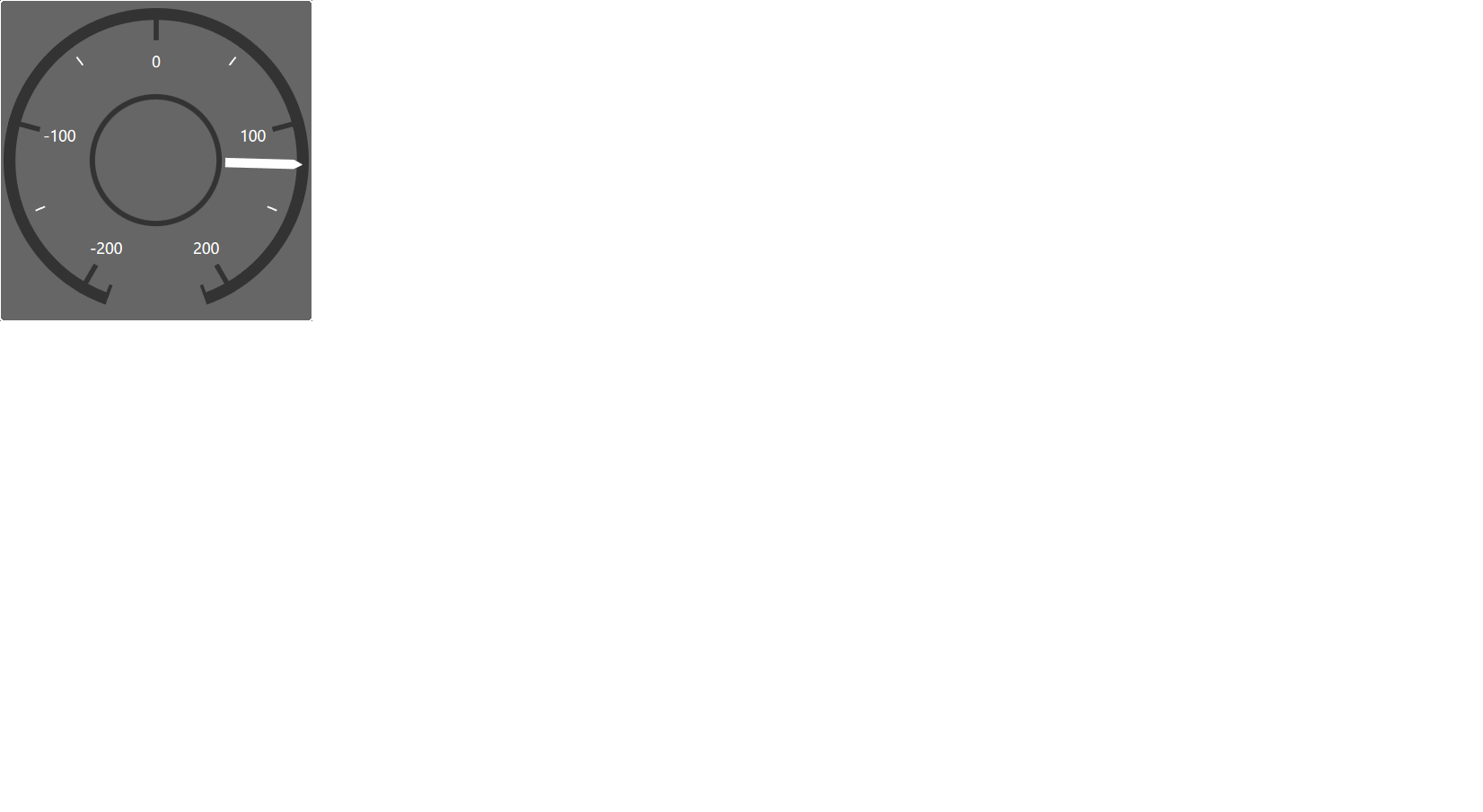
Есть тахометр,

Значение ула начала там где -200 это 120и развертка 310(там где значение 200).
И вот стрелке задано значение -30 но как видите стрелка показывает рядом с -100. Я расчитываю для значений стрелки от 120 градусов. Но предполагаю что я не правильные значения задаю для функции.
Вот так выглядит расчеты и методы куда я передаю.
angleValueTransformer.setAngleRangeDegrees(ValueRange<double>(120, 310));
angleValueTransformer.setValueRange(ValueRange<double>(m_ValueRange.m_Min, m_ValueRange.m_Max));
angleValueTransformer.setCurrentValue(m_NeedleValue);
Вторая строка это от минимального значения до максимального. По сути после этого я должен получить правильный угол, но не получаю. Подскажите пожалуйста, может в метод setAngleRangeDegrees я должен не в таком виде задавать значения. Это же я передаю углы.
Если важно то 0 точка это начало справа.


 Простой
Простой