Кстати, есть еще такой момент - если выход пид-регулятора будет колебаться достаточно быстро, то за счет инерционности нагрузки можно получить как бы "усреднение" воздействия (по аналогии с ШИМ-управлением), эквивалент некоторого промежуточного между двумя ступенями дискретного воздействия.да это понятно, что для системы это будет незаметно, а вот двигатель не очень любит такие скачки, да и число логически зачем прыгать то через ступень если расхождение не велико!?
power_level -= pid.update
power_level = zero_power - pid.update
power_level = zero_power - pid.updateи заметил один странный момент на низких оборотах (60 Об/мин) ПИД выдает такое управление, что приводит к большей фактической скорости, т.е. он где-то 64-66 и ниже не хочет опускаться... и в тоже время на высоких оборотах (120-140) с теми же коэффициентами наоборот не дотягивает до цели несколько попугаев, такого не было при формуле
power_level -= pid.update
на валу может быть "момент", а не "масса"на валу и то и другое, двигатель создает крутящий момент, а нагрузка обладает массой и этот момент "осваивает" если так можно выразиться.
Ребята, кто нибудь знает можно ли доучиться этот год в колледже и потом сразу же перейти в 11 класс?думаю это вопрос лучше задать директору школы, в которой вы хотите учиться...
Прикол в том, что в институте все равно будешь учить C++))ой не факт
power_level -= pid.update(target_rpm - rpm, rpm);power_level = MIN_POWER - pid.update(target_rpm - rpm, rpm);

всё правильно говорится, с некоторыми оговорками. основные минусы
1) говнокод. если использовать родное приложение, прошивка получается крайне кривой. отсюда лезет убогость работы по скорости, убогость работы библиотек (совместная работа нескольких), убогость вырастающего на этом кале "программиста", убогость по работе устройства в целом.
Ржу не могу :) Но кроме шуток, буквально так и будут выглядить измерения.
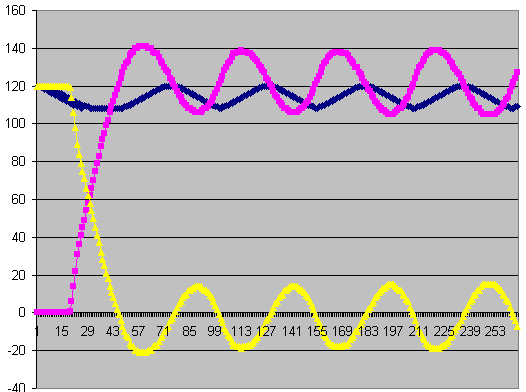
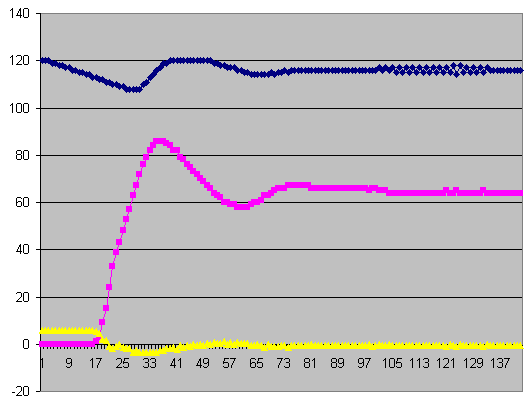
Вот графики, нагрузка постоянна, мощности (моменты открытия симистора для каждой кривой одинаковые) и тем не менее довольно заметно, как в правой половине есть существенные изменения скорости (очевидно сетевое напряжение гуляет).
Более подробно тут.
В чисто математическом подходе получается много неизвестных и вообще много переменных. Склоняюсь к построению экспериментальных графиков с последующей аппроксимацией.