Добрый день,
Имеется набор из ~10 equirectangular панорам (аля streetview). Для каждой панорамы я нашёл 10 точек, которые "смэппил" с другими панормами из набора...те pano 1-> точка U1,V1 = pano2-> точка U11,V11 , где U,V - координаты на конкретной панораме.
Необходимо: найти позицию и ориентацию каждой панорамы в едином 3D пространстве.
Я нашёл фреймворк OpenVSLAM, но он заточен на работу с видео и автоматическим определением features с помощью ORB. Мне он не подходит так как панорамы из набора сделаны в разное время года, освещения и тд... поэтому и необходимо использовать результат ручного мэппинга.
Спасибо.
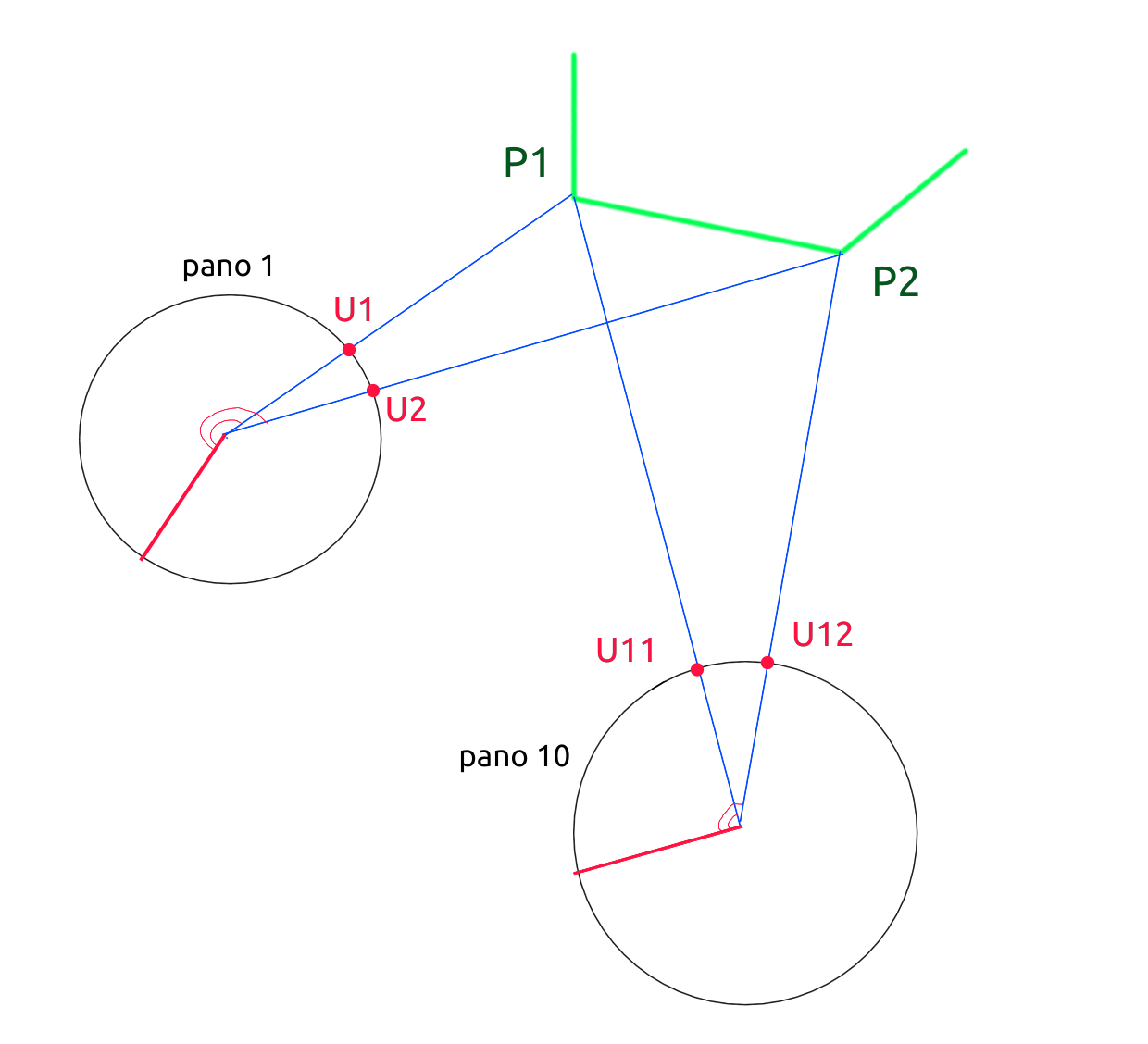
P.S. Иллюстрация 2D версии. Известны U1,U2, U11,U12 - можно подсчитать их углы от произвольно выбранного направления для каждой панорамы

 Простой
Простой






