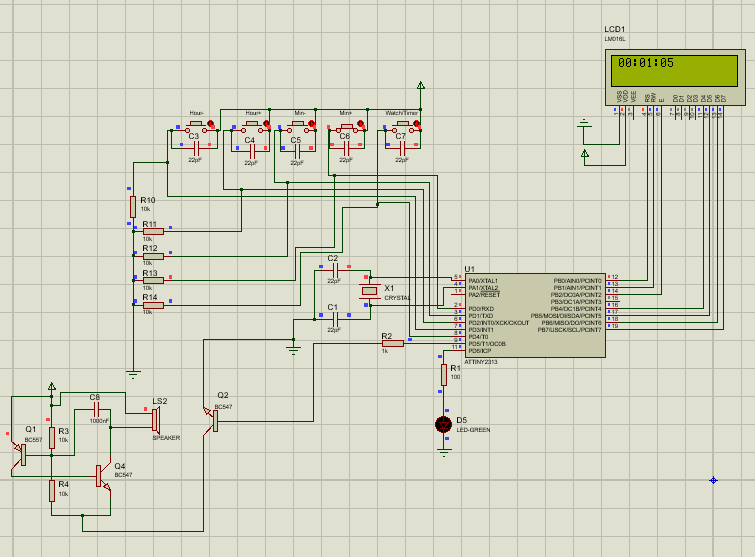
И так народ всем привет, я в электронике новичок и к не счастью а может и нет мне досталась курсовая по микропроцессорам. Что я делал и почему я тут. Задача была такая, на языке С (использовал Microchip studio) сделать на микроконтроллере ATTINY2313 с 5ю кнопками часы и таймер с обратным отсчётом. Я сделал все кроме таймера с обратным отсчетом. Есть предположение что я его не так настраиваю, но уже два дня прошло, чувствую просидел в пустую пожалуйста отзовитесь на помощь . Помоги своими профессиональными глазами увидеть истину.
#include <avr/io.h>
#include <util/delay.h>
#include <stdlib.h>
#include <avr/interrupt.h>
#include "lcd.h"
#include <stdio.h>
#include <string.h>z
#include <stdbool.h>
#define F_CPU 1000000UL
#define enable 2
#define registerselection 0
ISR(TIMER1_COMPA_vect);
ISR(TIMER0_COMPB_vect);
static volatile int SEC =0;
static volatile int MIN =0;
static volatile int HOU =0;
static volatile int TRSEC =0;
static volatile int TRMIN =0;
static volatile int TRHOU =0;
static bool min_plus_presd =0;
static bool hou_plus_presd =0;
static bool min_minus_presd =0;
static bool hou_minus_presd =0;
int main(void)
{
DDRA = 0xFF;
DDRD = 0b1100000;
DDRB = 0b11110111;
TCCR1B |=(1<<CS12)|(1<<CS10)|(1<<WGM12); // setting prescaler and CTC mode деление частоты на 1024 = 977
TIMSK |=(1<<OCIE1A);//compare match interrupt enable
OCR1A = 487;//setting compare value equal to counter clock frequency to get an interrupt every second
TCCR0B |=(1<<CS02)|(1<<CS00)|(1<<WGM02);
TIMSK |=(1<<OCF0A);//compare match interrupt enable
OCR0A = 487;//setting compare value equal to counter clock fr
//TIFR |=(1<<TOV1); // setting prescaler and CTC mode
//TIMSK |=(1<<OCIE1A);
sei(); // enabling global interrupts
//TIFR |=(1<<OCF1A);//compare match interrupt enable
lcd_init(LCD_DISP_ON);
while(1)
{
if (!(PIND & (1<<4)))//if the button is not pressed, then we manage the time
{
lcd_home();
char SHOWSEC [2];
char SHOWMIN [2];
char SHOWHOU [2];
//lcd_puts("Time ");
SHOWHOU[1] = HOU % 10;
SHOWHOU[0] = (HOU / 10) % 10;
SHOWMIN[1] = MIN % 10;
SHOWMIN[0] = (MIN / 10) % 10;
SHOWSEC[1] = SEC % 10;
SHOWSEC[0] = (SEC / 10) % 10;
lcd_putc(SHOWHOU[0] + '0');
lcd_putc(SHOWHOU[1] + '0');
lcd_putc(':');
lcd_putc(SHOWMIN[0] + '0');
lcd_putc(SHOWMIN[1] + '0');
lcd_putc(':');
lcd_putc(SHOWSEC[0] + '0');
lcd_putc(SHOWSEC[1] + '0');
PORTA&=~(1<<PIND5); //buzzer off
PORTA&=~(1<<PIND6); //LED-GREEN off
MIN_P();
MIN_M();
HOU_P();
HOU_M();
}
//===============================================================================
if (PIND & (1<<4))//if the button is pressed, then we manage the timer
{
lcd_home();
char SHOWTRSEC [2];
char SHOWTRMIN [2];
char SHOWTRHOU [2];
//lcd_puts ("Timer ");
SHOWTRHOU[1] = TRHOU % 10;
SHOWTRHOU[0] = (TRHOU / 10) % 10;
SHOWTRMIN[1] = TRMIN % 10;
SHOWTRMIN[0] = (TRMIN / 10) % 10;
SHOWTRSEC[1] = TRSEC % 10;
SHOWTRSEC[0] = (TRSEC / 10) % 10;
lcd_putc(SHOWTRHOU[0] + '0');
lcd_putc(SHOWTRHOU[1] + '0');
lcd_putc(':');
lcd_putc(SHOWTRMIN[0] + '0');
lcd_putc(SHOWTRMIN[1] + '0');
lcd_putc(':');
lcd_putc(SHOWTRSEC[0] + '0');
lcd_putc(SHOWTRSEC[1] + '0');
if (TRHOU==0 || TRMIN==0 || TRSEC==0)
{
PORTD|=(1<<5); //buzzer on
PORTD|=(1<<6); //LED-GREEN on
}
TRMIN_P();
TRMIN_M();
TRHOU_P();
TRHOU_M();
}
}
}
ISR(TIMER1_COMPA_vect){
if (++SEC==60)
{
SEC=0;
if (++MIN==60)
{
MIN=0;
if (++HOU==24)
{
HOU=0;
}
}
}
}
ISR(TIMER0_COMPA_vect){
}
void MIN_P()
{
if (PIND & (1<<0))
{
if (min_plus_presd == 0)
{
if (MIN<60)
{
MIN++;
}
if (MIN==60)
{
if (HOU<24)
{
HOU++;
}
MIN=0;
}
min_plus_presd = 1;
}
}
else
{
min_plus_presd = 0;
}
}
void MIN_M(){
if (PIND & (1<<1))
{
if (min_minus_presd == 0)
{
if (MIN>0)
{
MIN--;
}
min_minus_presd = 1;
}
}
else{
min_minus_presd = 0;
}
};
void HOU_P(){
if (PIND & (1<<2))
{
if (hou_plus_presd == 0)
{
if (HOU<24)
{
HOU++;
}
if (HOU==24)
{
HOU=0;
}
hou_plus_presd = 1;
}
}
else
{
hou_plus_presd = 0;
}
};
void HOU_M(){
if (PIND & (1<<3))
{
if (hou_minus_presd == 0)
{
if (HOU>0)
{
HOU--;
}
hou_minus_presd = 1;
}
}
else{
hou_minus_presd = 0;
}
};
void TRMIN_P()
{
if (PIND & (1<<0))
{
if (min_plus_presd == 0)
{
if (TRMIN<60)
{
TRMIN++;
}
if (TRMIN==60)
{
if (TRHOU<24)
{
TRHOU++;
}
TRMIN=0;
}
min_plus_presd = 1;
}
}
else
{
min_plus_presd = 0;
}
}
void TRMIN_M(){
if (PIND & (1<<1))
{
if (min_minus_presd == 0)
{
if (TRMIN>0)
{
TRMIN--;
}
min_minus_presd = 1;
}
}
else{
min_minus_presd = 0;
}
};
void TRHOU_P(){
if (PIND & (1<<2))
{
if (hou_plus_presd == 0)
{
if (TRHOU<24)
{
TRHOU++;
}
if (TRHOU==24)
{
TRHOU=0;
}
hou_plus_presd = 1;
}
}
else
{
hou_plus_presd = 0;
}
};
void TRHOU_M(){
if (PIND & (1<<3))
{
if (hou_minus_presd == 0)
{
if (TRHOU>0)
{
TRHOU--;
}
hou_minus_presd = 1;
}
}
else{
hou_minus_presd = 0;
}
};
/*
if (++SEC==60)
{
SEC=0;
if (++MIN==60)
{
MIN=0;
if (++HOU==24)
{
HOU=0;
}
}
}
*/

 Простой
Простой
 Простой
Простой
 Средний
Средний
