LoliDeveloper, где эти статические версии можно получить? Либо Clion не находит их, либо их нет в пакете вовсе. (устанавливал пакет sfml через консоль командой sudo apt-get install libsfml-dev)
freeExec, у меня не совсем batch = 1., у меня batch произвольного размера, т.к. градиент считается всё равно суммарный, просто считается не всё параллельно, а по очереди. На старте обучения фотографии на выходе генератора получаются почти монотонные. Также ещё проверил на примитивных данных (просто один скаляр) - он учится относительно нормально на перцептронах (порядка 20к итераций наборами по 5 значений), если давать, как пример значения из одного диапазона, но если давать из двух диапазонов - уже не учится.
Вы хотите сделать так, чтобы данный метод был перегружен автоматически для каждого дочернего класса? Если так, то гарантируете ли вы, что во всех дочерних классах будет конструктор по умолчанию?
Антон Жилин, в конкретно моём случае я определяю класс тензоров. у него есть дочерние классы: скаляр, вектор, матрица, 3d и 4d тензоры и ещё парочка классов. Они все используют массив V в качестве хранилища всех значений и маленький массив int *metrics, который имеет постоянный размер внутри класса (у скаляра - 0, у вектора - 1, у матрицы - 2, у 3/4d тензора - 3/4). И, допустим, мне надо написать метод printMetrics(), то проще будет написать один универсальный метод в родительском классе, чем в каждом подклассе отдельно. Да и в целом, независимо от задачи, подобное знание может быть полезным в дальнейшем.
А есть примеры шаблонов проектов на c++?
А то структура у этих шаблонов ни капли не похожа на структуру тех, что создаёт VS у меня.
Да и вопрос в другом - как именно нужно правильно должны создаваться шаблоны?
freeExec, Я последовала вашему совету и попыталась найти архитектуру в "настройках сборки", но не смогла - можете, пожалуйста, точнее написать - где искать то? И ещё - что делать с первым пунктом?
freeExec, я не знаю, я просто создала проект cuda без изменений и пока не вникала в архитектуры и прочее. Если это действительно важно, то как можно узнать, под какую архитектуру собирается kernel и какие поддерживает видеокарта?
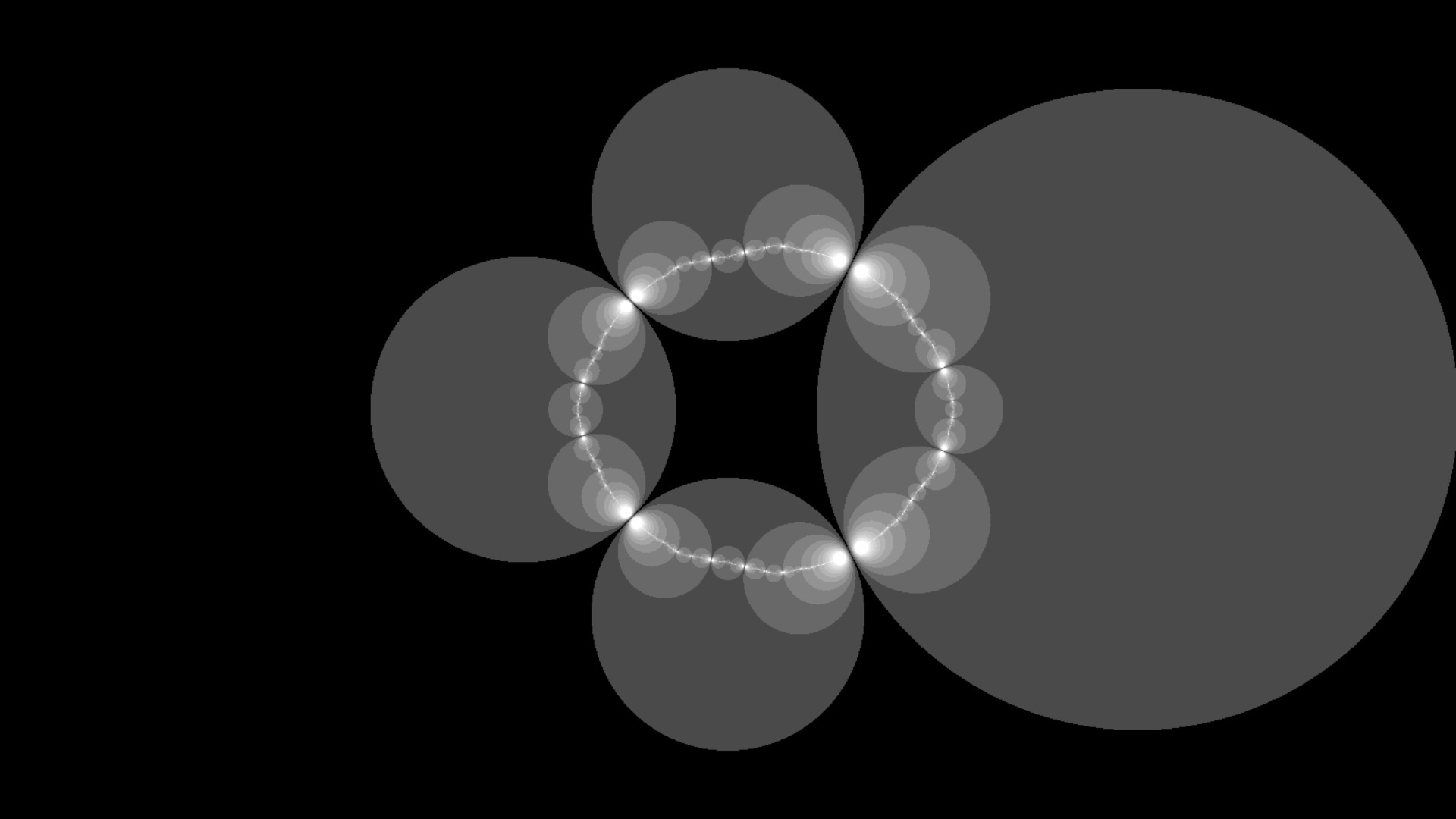
wataru, Нет, я не про белые круги, я знаю, как их дорисовать. Я говорю, что предельные круги (или предельное множество) не образуют что-то более-менее цельное, примерно как, например, на этом фото:
здесь видно, то внутренние части кругов находятся близко друг к другу, однако у меня на прошлом фото они лежат в разных частях кругов (в верхнем и нижнем - у центра, в левом и правом - не у центра).
Вообще, как я выяснила, группа Шоттки не обязательно образуется преобразованиями Мёбиуса, значит ли это, что инверсии вокруг окружностей (z -> r*r/_(z-P) + P, где _z - сопряжение) образуют "верную" группу (та, что на прикреплённом фото)? Или есть способ сделать "верную" группу Шоттки только преобразованиями Мёбиуса?
wataru, Я пробовала. Даже делала так, чтобы они касались. Проблема в том, что они при соединении не образуют "светящийся" замкнутый или почти замкнутый контур узора. Единственный случай, при котором вышло что-то похожее - замена трансформаций, описанных в методе на обычные инверсии относительно окружности, но это явно неверный алгоритм.
А можно, пожалуйста, прикрепить ссылку на какой-то простой проект с использование canvas-а того же? С рисованием множества Мандельброта/Жюлиа или чего-то такого уровня, например.
Joulence, у трапеции достаточно проверить, что есть 2 таких вектора, что ab = |a||b| ну и проверить остальные на пересечение с помощью того же скалярного произведения (то же самое, что проверка угла на тупость/остроту/прямоту).
Поправлю вас:
обычный треугольник:
+-c=+-a+-b (условие для всех треугольников)
Прямоугольный: ab=0 || bc=0 || ac=0
Равносторонний: abs(a)=abs(b)=abs(c). И оформите это как ответ.
Возможно, ошибка в этих строках:
transform.localRotation = Quaternion.Euler(180, 0, -rotZ);
transform.localRotation = Quaternion.Euler(180, 180, -rotZ);
дело в том, что тело отражается в строке
transform.localScale = movex;
из-за чего, второй раз отражаются и руки.