Есть способ сепеарации с разными скоростями конвееров, например как-то так(веерные шторки можно не использовать, они нужны на случай прихода большого массива самых мелких деталей):
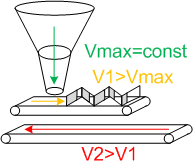
В таком случае максимальная скорость поступления частиц равна скорости ссыпания самых мелких частиц через заданное отверстие воронки, и если с верхнего конвеера частицы попадают на нижний, то при скорости нижнего заметно большей чем у верхнего они обретают пробелы, так сказать дыры передискретизации. А шторки снижают и без того малую вероятность падения на нижний транспотер двух частиц одновременно. Далее можно обойтись оптическим датчиком наличия частицы на транспортере дабы выделить ее, скажем столкнув с него в определенную ячейку.
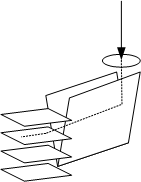
А сепарацию по минимальному диагональному размеру частиц близких по форме к правильным трехмерным фигурам можно использовать наклонный желоб треугольного сечения, на котрый с верхнего конца насыпают частицы, а на нижнем принимают их в потоки по размеру соответственно высоте, к нему лучше приделать вибромотрчик, дабы уменьшить трение, и эффективнее он со ступенчатым сечением чем с треугольным, но для теории понятна картинка и с треугольным.
Но даже если транспортерная лента это сложно, в любом случае разница скоростей есть решение задачи сепарации, сначала ограничиваешь максимальную скорость потока, потом увеличиваешь ее дабы добавить пробелы дискретизации, эдакая смесь теоремы Котельникова с законом неразрывности струи.



 Простой
Простой


