Дополню ответ
Aleksey Solovyev.
1. Переводим в чб.
2. На бинарном изображении (вместо cv2.Canny необходимо применить cv2.threshold, так как цвет рамки - белый то подобрать порог будет нетрудно) необходимо найти внешний контур (cv2.findContours с параметром RETR_EXTERNAL) и затем останется сохранить часть изображения, которая лежит внутри контура.
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <algorithm>
int main(int argc, char *argv[])
{
cv::Mat img,gr,th;
img = cv::imread("1.jpg");
cv::cvtColor(img, gr, cv::COLOR_BGR2GRAY);
cv::threshold(gr, th, 240.0, 255, cv::THRESH_BINARY);
std::vector<std::vector<cv::Point> > contours;
cv::findContours(th, contours, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_NONE);
auto max_vector_comp = [](std::vector<cv::Point> &lhs,
std::vector<cv::Point> &rhs)
{
return lhs.size() < rhs.size();
};
//поиск самого длинного контура
auto maxVector = std::max_element(contours.begin(), contours.end(),
max_vector_comp);
//находим описывающий прямоугольник
cv::Rect roi = cv::boundingRect(*maxVector);
cv::Mat croppedImg;
croppedImg = img(roi);
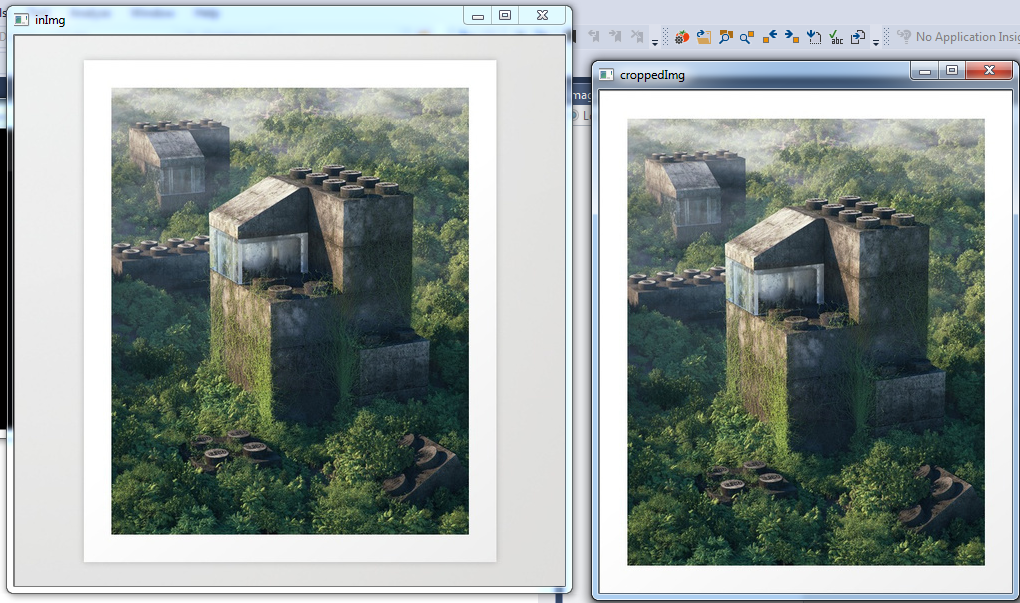
cv::imshow("inImg", img);
cv::imshow("croppedImg", croppedImg);
cv::waitKey();
return 0;
}