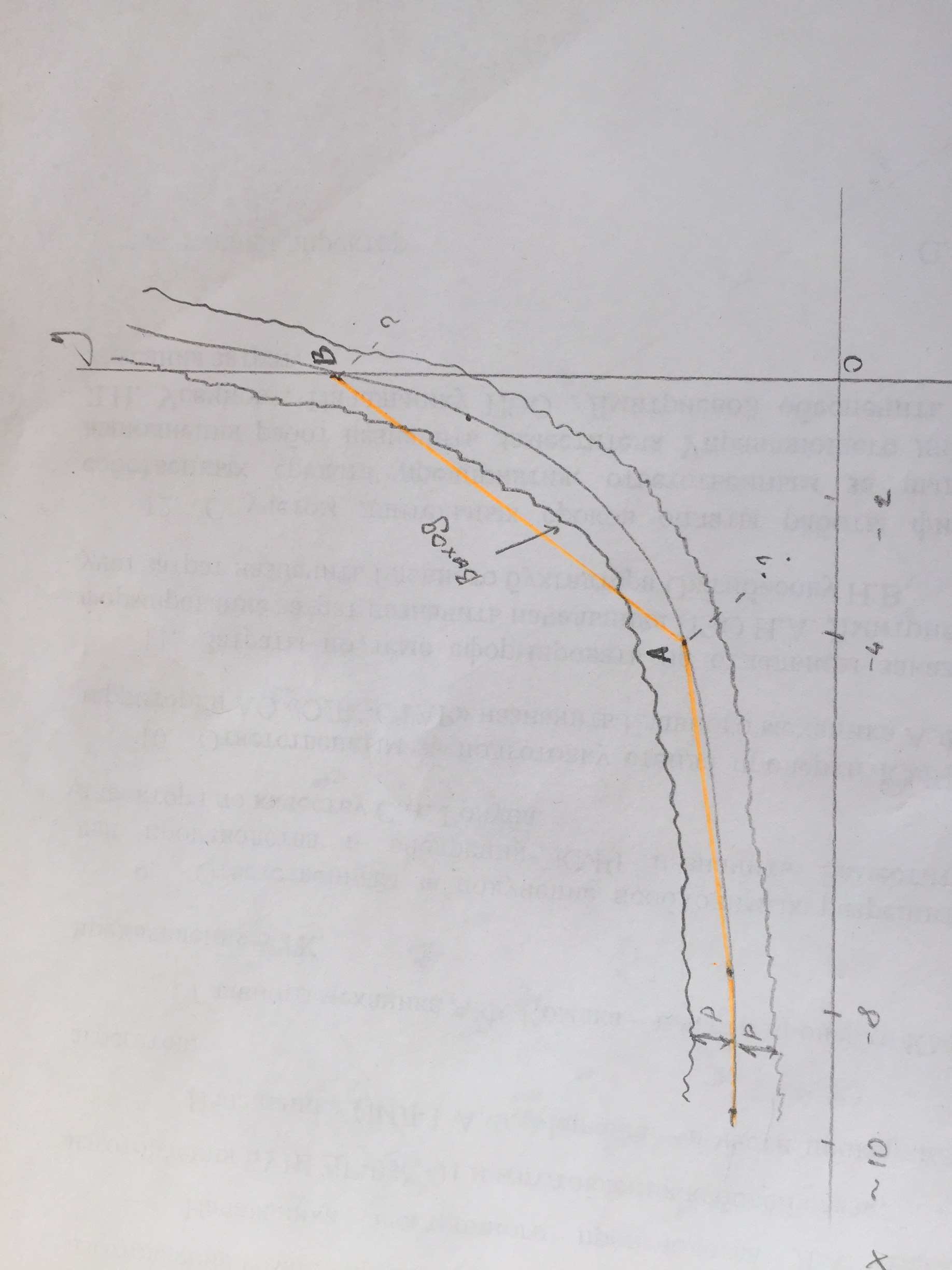
Сергей Соколов, дельта это пунктирная линия вдоль расчетной функции. Фишка в том чтобы функция кусочно линейной аппроксимации не выходила за нее при усреднении графиков
Александр Скуснов, Привязка к особенностям ПИД регулирования, наверное, не совсем корректна, речь больше про математический аппарат, который позволял бы по двум графикам с учетом допустимой погрешности получить кусочно-линейную функцию, которая в некотором роде усредняла эти два графика. Какая то хитрая аппроксимация не выходящая за допустимые значения погрешности.
Александр Скуснов,
1) пространственная координата
2) по оси ординат
График это отображение зависимости одной переменной от другой(скажем обороты двигателя от топливного насоса)
Графики на моем рисунке это расчетные графики, условно, они проведены по 10 точкам. С помощью exel построили полином. В идеале, так же должна получится кусочно-линейная функция
Александр Скуснов, спасибо за внимание к моей проблеме. Смотрите, есть некоторый процесс которым должен управлять пид регулятор. Пид регулятор строго линейный(таковы особенности системы). Есть расчетные характеристики процесса (некая f(x)). У этой f(x), условно, есть погрешность за рамки которой мы не должны выходить. Есть график реального процесса, как правило, измерения с какого либо стенда. Естественно, характеристика снятия с реального стенда имеет погрешности на некоторых участках. Необходимо запрограммировать пид регулятор таким образом, чтобы линейная функция по которой он шел была бы средним значением между расчетным графиком и снятым со стенда, но не выходила за рамки допустимых значений(погрешности) расчетного графика. Мне сказали, что вроде есть какой то хитрый мат аппарат для построения такой аппроксимации(возможно, интерполяции)
{kind=link}