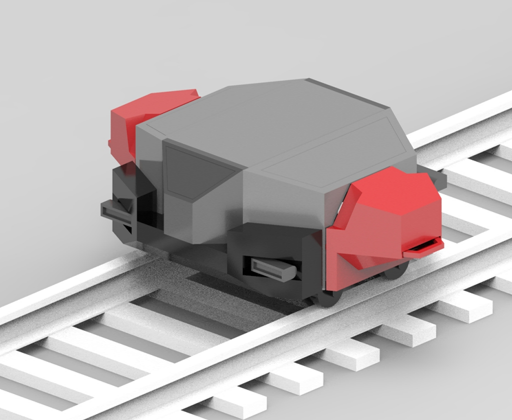
, которые измеряют только пару параметров. Наш проект будет измерять одновременно всё, ещё и анализировать рельсы с помощью ИИ. ЖД одобрил проект на конкурс, осталось идеально реализовать. Кроме raspb больше вариантов нет, в нашем случае удобнее всего и мощности хватит
, которые измеряют только пару параметров. Наш проект будет измерять одновременно всё, ещё и анализировать рельсы с помощью ИИ. ЖД одобрил проект на конкурс, осталось идеально реализовать. Кроме raspb больше вариантов нет, в нашем случае удобнее всего и мощности хватит