Леонид, "соспоставить" - дал импульс и точно знаю что файл на фтп с именем ХХХХХХХ это именно он.
забрать - дал импульс и как минимум получил отчет( с гарантированным временем ответа): файл лежит там то, звать так то, бери и пользуйся. А еще разумнее если бы кадр тупо присылался RAWом в TCP сокет / websocket / HTTP POST / ..., а не выгружался куда то и когда нибудь на свое усмотрение.
1) сложновато сопоставить файл на фтп с конкретным обьектом( только по таймштампу?). Хотелось бы четкости: дал импульс -> забрал фото.
2) хотелось бы управлять съемкой( фиг знает что она там надетектит сама, особенно если события с интервалом в пару сек будут). БЫТОВАЯ видео аналитика под такое, по моему, не заточена.
HeoRitsu, Понятно что не умеет: "радиолюбительство" никто не отменял. А без ОС по моему не реально: слишком нежное основание, если только не придумать лазер который медь берет, а подложку нет
Вероятно в данной ситуации потребуется обратная связь( например оптическая), т.е.:
1) в режиме тупого ЧПУ снимаем 90% меди( хоть штриховкой/хоть сеточкой/...)
2) переходим в режим "рихтовки" на пониженной мощности( сканируем и выжигаем в несколько заходов: оставшиеся 10%/полосочки/точечки/островки/...)
или комбинировать лазер/травление:
1) в режиме тупого ЧПУ снимаем 90% меди( хоть штриховкой/хоть сеточкой)
2) травим всю плату( в результате дорожки потеряют 10% меди( фольгу взять потолще))
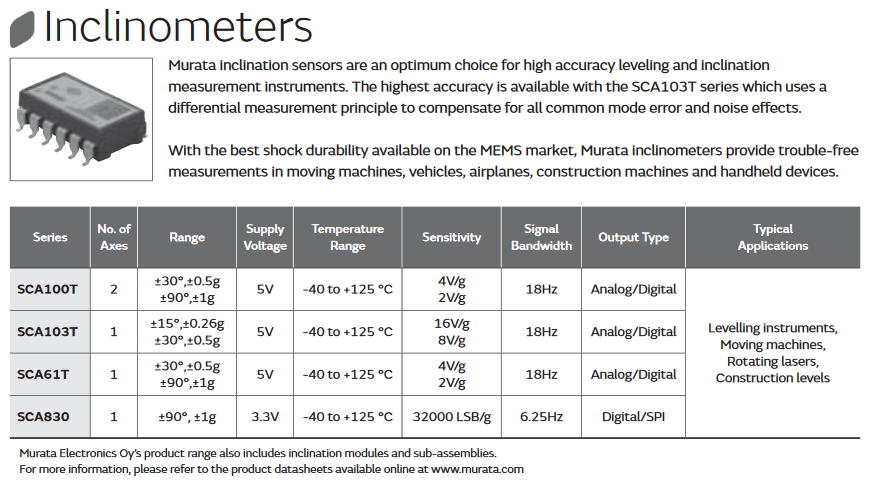
zodder, Насчет накопления ошибки не слышал, а вот ошибка смешения у них есть - значение приводится в документации на конкретное изделие( так же как и разрешение)
Если узел неподвижен( здание например), то меряю обычно с помощью 3х осевых акселерометров с чутьем чуть больше 1g.
Из показаний вычисляется вектор гравитационнго поля( = вертикаль).
javedimka: @classmethod т.е. вызвать метод с указателем на вызывающий класс(как будто это наш метод)?
В этом случае неясно что будет с локальными данными и самим классом???
забрать - дал импульс и как минимум получил отчет( с гарантированным временем ответа): файл лежит там то, звать так то, бери и пользуйся. А еще разумнее если бы кадр тупо присылался RAWом в TCP сокет / websocket / HTTP POST / ..., а не выгружался куда то и когда нибудь на свое усмотрение.