Это же старый добрый параллаксный дальномер, верно? Его точность (кроме прочего) будет сильно зависеть от точности измерения угла (азимута) на объект, когда веб-камера отслеживает его положение в кадре. Насколько помню теоретические основы, там вообще достаточно знать расстояние между камерами (базу) и разницу этих азимутов с обоих точек наблюдения при положении объекта в центре кадра - после этого расстояние легко рассчитывается обычной тригонометрией.
Следовательно, для каждой камеры нужен точный датчик угла - он, собственно, и задаёт точность. А что касается параметров самой камеры - они могут быть и не слишком крутыми, лишь бы их было достаточно для того, чтобы загнать объект точно в центр кадра. Нахождение объекта в центре (фактически - совмещение изображений с обеих камер) должно идентифицироваться управляющим контроллером, значит, излишне детальное изображение может затруднить (замедлить) эту идентификацию. Плюс распознавание объекта на фоне прочих местных предметов... В общем, берите 1 мегапиксель - думаю, для начала этого будет достаточно.
Что касается освещённости объекта - мне кажется, этот вопрос вообще посторонний, поскольку относится не к камере, а к затратам на пару светодиодов (инфракрасных, если желательна незаметность).

 Простой
Простой
 Средний
Средний

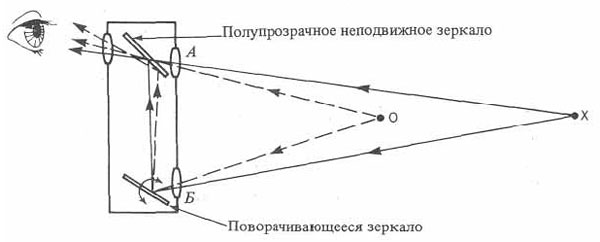 Два зеркала, одно из них полупрозрачное и может поворачиваться на небольшой, но точно отмеренный угол. Глядя через него, надо совместить два изображения, создаваемых этими зеркалами, и тогда на шкале будет расстояние до объекта. Вот
Два зеркала, одно из них полупрозрачное и может поворачиваться на небольшой, но точно отмеренный угол. Глядя через него, надо совместить два изображения, создаваемых этими зеркалами, и тогда на шкале будет расстояние до объекта. Вот 