Упоминая Q я имел в виду кватернион, задающий направление, к которому пружина стремится повернуть второе тело. В простейшем случае он совпадает с Q0. В идеальном случае второе тело совершает гармонические колебания, которые должны гаситься, если в программе сделать дополнительную поправку на гасящий момент Torque с учётом угловой скорости. Амплитуда колебаний определяется начальным положением второго тела.
i67.fastpic.ru/big/2014/0730/bc/46a217b24553e9af9d...
Вся эта эпопея связана с тем, что в Open Dinamic Engine, который просчитывает физику, пока нет поддержки ограничений. Этот недостаток я решил исправить написанием библиотеки, которая рассчитывает реакции пружин.
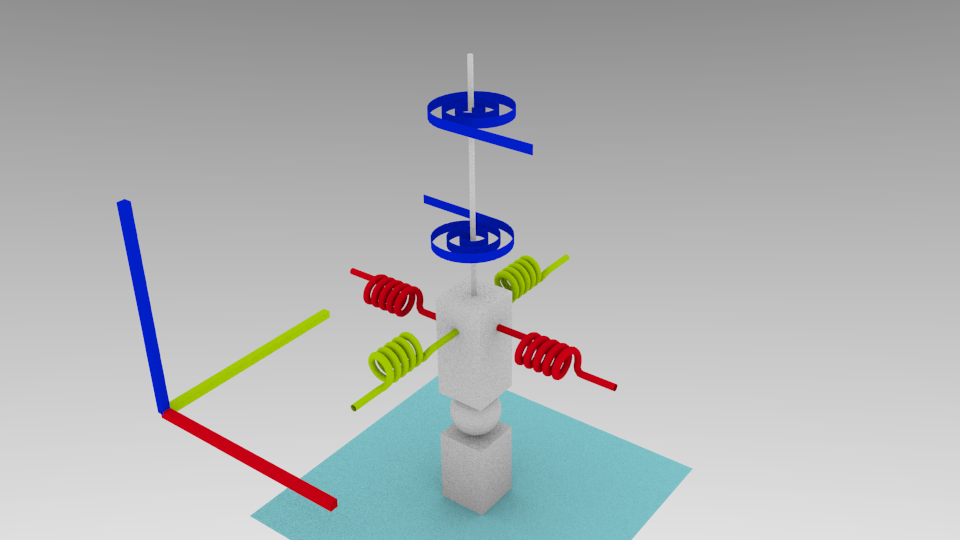
Значит я плохо пояснил, что мне нужно. И момент инерции тогда тут не при чём. Вкратце: есть два тела, одно закреплено жестко в ориентации Q0=(w=1,x=0,y=0,z=0) и никуда не двигается, второе закреплено с ним шаровым шарниром и пружиной, которая не даёт ему отклониться от Q. И мне нужно узнать момент Torque относительно глобальных осей в зависимости от вектора ориентации второго тела заданного кватернионом Q2.
Спасибо, находил эту книгу. Перечитал ещё раз.
К сожалению ни формулы, ни примера, который бы подтолкнул меня к решению проблемы я не нашёл. Тело упрямо раскручивается вокруг своей оси 0Z и улетает в космос.
{kind=link}