Есть dynamic Rigidbody, которое может быть запущено с помощью мыши. В какой-то момент Rigidbody по неизвестной причине перестаёт реагировать на мышь. Скорость Rigidbody при этом равна 0.
К Rigidbody прикреплены два Spring joints.
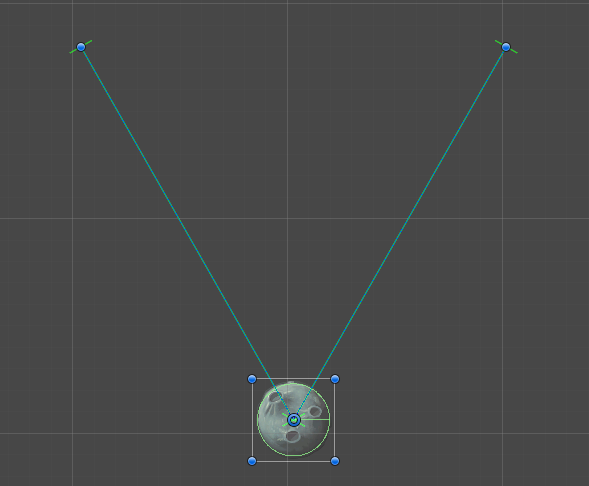


Единственный способ как можно пробудить тело это при отладке по-очереди отключить и снова включить Spring Jointы.
public class Ball : MonoBehaviour
{
private Rigidbody2D rigidbodyBall;
public SpringJoint2D[] springJoints;
private GameObject speed;
public static Ball instance = null;
#region Life Cycle
void Awake()
{
speed = GameObject.Find("Velocity");
springJoints = GetComponents<SpringJoint2D>();
rigidbodyBall = GetComponent<Rigidbody2D>();
gameManager = GameObject.Find("GameManager").GetComponent<GameManager>();
}
private bool clickedOn = false;
void Update()
{
if (clickedOn)
{
Dragging();
UIManager.instance.pauseButton.SetActive(false);
UIManager.instance.totalScoreUI.gameObject.SetActive(false);
}
else
{
UIManager.instance.pauseButton.SetActive(true);
UIManager.instance.totalScoreUI.gameObject.SetActive(true);
}
}
#endregion
#region Launcher
#region Mouse
void OnMouseDown()
{
SpringJointDeactivate();
clickedOn = true;
}
void OnMouseUp()
{
SpringJointActivate();
clickedOn = false;
SetKinematicState(false);
Invoke("SpringJointDeactivate", 0.1f);
}
void Dragging()
{
Vector3 mouseWorldPointStart = transform.position;
Vector3 mouseWorldPoint = Camera.main.ScreenToWorldPoint(Input.mousePosition);
mouseWorldPoint.z = 0f;
if (Boundary.ballInBoundary)
{
transform.position = mouseWorldPoint;
float diffX = mouseWorldPoint.x - mouseWorldPointStart.x;
//TODO
for (int i = 0; i < springJoints.Length; i++)
{
springJoints[i].connectedAnchor = new Vector2(springJoints[i].connectedAnchor.x + diffX, springJoints[i].connectedAnchor.y);
}
}
else
{
Debug.Log("Another situation!");
Debug.Log(Boundary.ballInBoundary);
}
}
#endregion
public void SpringJointActivate()
{
foreach (SpringJoint2D joint in springJoints)
{
joint.enabled = true;
}
}
public void SpringJointDeactivate()
{
foreach (SpringJoint2D joint in springJoints)
{
joint.enabled = false;
}
}
public Vector3[] GetSpringJointsConnectedAnchorCoord()
{
Vector3[] springJointsCoord = new[] { Vector3.zero, Vector3.zero };
for (int i = 0; i < springJoints.Length; i++)
{
springJointsCoord[i] = springJoints[i].connectedAnchor;
}
return springJointsCoord;
}
#endregion
public void SetKinematicState(bool kinematicState)
{
rigidbodyBall.isKinematic = kinematicState;
}
В чём причина такого поведения? Можно ли как-нибудь исправить эту ситуацию?

 Средний
Средний
 Простой
Простой
 Простой
Простой


