
#!/usr/bin/env python
# -*- coding:utf-8 -*-
from __future__ import division # / - деление
import pygame, math
from pygame import *
WIN_WIDTH = 800 #Ширина создаваемого окна
WIN_HEIGHT = 600 # Высота
SKREEN_COLOR = (100,255,200)
WIDTH = 3000 #Ширина поля робота
HEIGHT = 3000 #Высота
PATH_ROBOT_IMAGE = 'image/robot.png'
######## ПЛАТФОРМЫ ###########
PLATFORM_WIDTH = 4
PLATFORM_HEIGHT = 4
PLATFORM_COLOR = "#FF6262"
##############################
backward = forward = False #Робот стоит
############## Класс для отрисовки робота
class Sprite(pygame.sprite.Sprite): #Наследование класса Sprite
def __init__(self, filename, startx, starty):
pygame.sprite.Sprite.__init__(self)#инициализация __init__ в классе Sprite
self.image = pygame.image.load(filename)
self.rect = self.image.get_rect()
self.rect.x = startx
self.rect.y = starty
def render(self, screen, pos = (0, 0), angle = 0):
#Поворачиваю картинку
image = pygame.transform.rotate(self.image, angle)
self.rect = image.get_rect(center=self.rect.center)
screen.blit(image, self.rect)
def move(self, forward, backward, angle, path):
rad_alfa = angle * (math.pi/180)
if forward:
self.rect.x = self.rect.x + path*math.cos(rad_alfa)
self.rect.y = self.rect.y - path*math.sin(rad_alfa)
if backward:
self.rect.y +=path*math.sin(rad_alfa)
self.rect.x -=path*math.cos(rad_alfa)
def get_position(self):
return self.rect.center
#image = 0
############## Класс для отрисовки платформ
class Platform(pygame.sprite.Sprite):
def __init__(self, x, y):
pygame.sprite.Sprite.__init__(self)#инициализация __init__ в классе Sprite
self.image = Surface((PLATFORM_WIDTH, PLATFORM_HEIGHT))
self.image.fill(Color(PLATFORM_COLOR))
self.rect = Rect(x, y, PLATFORM_WIDTH, PLATFORM_HEIGHT)
pygame.init()
screen = pygame.display.set_mode((WIN_WIDTH, WIN_HEIGHT)) #Размер экрана
robot = Sprite(PATH_ROBOT_IMAGE, 400, 300) #Создание робота на координатах 0,0
entities = pygame.sprite.Group() # Все объекты
platforms = [] # то, во что мы будем врезаться или опираться
#entities.add(robot)#Добавляем спрайт робота в группу ко всем объектам
def position(x0 ,y0, alfap, distanse):
rad_alfap = alfap * (math.pi/180)
y = float(y0) + (math.sin(rad_alfap)*distanse)
x = float(x0) + (math.cos(rad_alfap)*distanse)
pos=(x, y) #Отображаем ось Oy вертикально вверх
print pos
return pos
clok = pygame.time.Clock()
while True:
for e in pygame.event.get():
if e.type == pygame.QUIT: exit(0)
if e.type == pygame.KEYDOWN and e.key == pygame.K_ESCAPE: exit(0)
screen.fill((100, 255, 100))
forward = True #Движение вперед
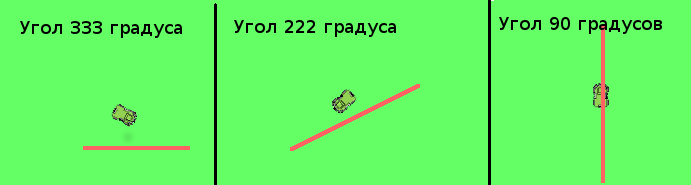
angle =222 #Угол движения (222 90 333)
path =2 #Cкорость движения
robot.move(forward, backward, angle, path) #Движение робота
distanse = 70 # Расстояния на котором отмечается прямоугольник перед роботом
pos_robot = robot.get_position() #Получения координат спрайта робота (размер 25х16)
ppos = position(pos_robot[0], -(pos_robot[1]), angle, distanse) #Нахождении координат прямоугольника
robot.render(screen, (400, 400), angle) #Поворот спрайта на угол angle
pf = Platform(ppos[0], -ppos[1])
entities.add(pf)
platforms.append(pf)
entities.draw(screen)
pygame.display.update()
clok.tick(30)class Sprite(pygame.sprite.Sprite): #Наследование класса Sprite
def __init__(self, filename, startx, starty):
pygame.sprite.Sprite.__init__(self)#инициализация __init__ в классе Sprite
self.image = pygame.image.load(filename)
self.rect = self.image.get_rect()
self.rect.x = startx
self.rect.y = starty
self.x = float(startx)
self.y = float(startx)
def render(self, screen, pos = (0, 0), angle = 0):
#Поворачиваю картинку
image = pygame.transform.rotate(self.image, angle)
self.rect = image.get_rect(center=self.rect.center)
screen.blit(image, self.rect)
def move(self, forward, backward, angle, path):
rad_alfa = angle * (math.pi/180)
if forward:
self.x = self.x + (path * math.cos(rad_alfa))
self.y = self.y - (path * math.sin(rad_alfa))
self.rect.x = self.x
self.rect.y = self.y
if backward:
self.y +=path*math.sin(rad_alfa)
self.x -=path*math.cos(rad_alfa)
self.rect.x = self.x
self.rect.y = self.y
def get_position(self):
return self.rect.center#!/usr/bin/env python
# -*- coding:utf-8 -*-
from __future__ import division # / - деление
import pygame, math
from pygame import *
WIN_WIDTH = 800 #Ширина создаваемого окна
WIN_HEIGHT = 600 # Высота
SKREEN_COLOR = (100,255,200)
WIDTH = 3000 #Ширина поля
HEIGHT = 3000 #Высота
PATH_ROBOT_IMAGE = 'image/robot.png'
######## ПЛАТФОРМЫ ###########
PLATFORM_WIDTH = 4
PLATFORM_HEIGHT = 4
PLATFORM_COLOR = "#FF6262"
##############################
path = 5
entities = pygame.sprite.Group() # Все объекты
platforms = [] # то, во что мы будем врезаться или опираться
angle = 360 #Начальный уго
backward = forward = False #Робот стоит
############## Класс для отрисовки робота]
class Camera(object):
def __init__(self, camera_func, width, height):
self.camera_func = camera_func
self.state = Rect(0, 0, width, height)
def apply(self, target):
return target.rect.move(self.state.topleft)
def update(self, target):
self.state = self.camera_func(self.state, target.rect)
def camera_configure(camera, target_rect):
l, t, _, _ = target_rect
_, _, w, h = camera
l, t = -l+WIN_WIDTH / 2, -t+WIN_HEIGHT / 2
l = min(5000, l) # Не движемся дальше левой границы
l = max(-(camera.width-WIN_WIDTH), l) # Не движемся дальше правой границы
t = max(-(camera.height-WIN_HEIGHT), t) # Не движемся дальше нижней границы
t = min(5000, t) # Не движемся дальше верхней границы
return Rect(l, t, w, h)
camera = Camera(camera_configure, WIDTH, HEIGHT)
class Sprite(pygame.sprite.Sprite): #Наследование класса Sprite
def __init__(self, filename, startx, starty):
pygame.sprite.Sprite.__init__(self)#инициализация __init__ в классе Sprite
self.image = pygame.image.load(filename)
self.rect = self.image.get_rect()
self.rect.x = startx
self.rect.y = starty
self.x = float(startx)
self.y = float(startx)
def render(self, screen, pos = (0, 0), angle = 0):
#Поворачиваю картинку
pygame.sprite.Sprite.__init__(self)#инициализация __init__ в классе Sprite
image = pygame.transform.rotate(self.image, angle)
self.rect = image.get_rect(center=self.rect.center)
robot_r = screen.blit(image, self.rect)
def move(self, forward, backward, angle, path):
rad_alfa = angle * (math.pi/180)
if forward:
self.x = self.x + (path * math.cos(rad_alfa))
self.y = self.y - (path * math.sin(rad_alfa))
self.rect.x = self.x
self.rect.y = self.y
if backward:
self.y +=path*math.sin(rad_alfa)
self.x -=path*math.cos(rad_alfa)
self.rect.x = self.x
self.rect.y = self.y
def get_position(self):
return self.rect.center
############## Класс для отрисовки платформ
class Platform(pygame.sprite.Sprite):
def __init__(self, x, y):
pygame.sprite.Sprite.__init__(self)#инициализация __init__ в классе Sprite
self.image = Surface((PLATFORM_WIDTH, PLATFORM_HEIGHT))
self.image.fill(Color(PLATFORM_COLOR))
self.rect = Rect(x, y, PLATFORM_WIDTH, PLATFORM_HEIGHT)
pygame.init()
screen = pygame.display.set_mode((WIN_WIDTH, WIN_HEIGHT)) #Размер экрана
robot = Sprite(PATH_ROBOT_IMAGE, 0, 0) #Создание робота на координатах 0,0
list_sonic = {1: 0, 2: 45, 3: 90, 4: 180, 5: 270, 6: 315}
def real_alige(teta, namber_sonic): #Угол вектора
if 0<=teta<=90 :
alfat = teta + list_sonic[namber_sonic]
print '1111'
elif 90<teta<=180:
if namber_sonic>=5: alfat=list_sonic[namber_sonic]-(360-teta)
else: alfat = teta + list_sonic[namber_sonic]
elif 180<teta<=270:
if namber_sonic>=4: alfat=list_sonic[namber_sonic]-(360-teta)
else: alfat = teta + list_sonic[namber_sonic]
elif 270<teta<=360:
if namber_sonic>=3: alfat=list_sonic[namber_sonic]-(360-teta)
else: alfat = teta + list_sonic[namber_sonic]
#print alfat
return alfat
def position(x0 ,y0, alfap, distanse):
rad_alfap = alfap * (math.pi/180)
y = float(y0) + (math.sin(rad_alfap)*distanse) + math.sin(rad_alfap)*12.5
x = float(x0) + (math.cos(rad_alfap)*distanse) + math.cos(rad_alfap)*12.5
pos=(x, y)
return pos
clok = pygame.time.Clock()
while True:
for e in pygame.event.get():
if e.type == pygame.QUIT: exit(0)
if e.type == pygame.KEYDOWN and e.key == pygame.K_ESCAPE: exit(0)
if e.type == pygame.KEYDOWN and e.key == pygame.K_LEFT:
angle += 5
if angle >=360: angle = 0
if e.type == pygame.KEYDOWN and e.key == pygame.K_RIGHT:
angle -= 5
if angle <=0: angle = 360
if e.type == pygame.KEYDOWN and e.key == pygame.K_DOWN: backward = True
if e.type == pygame.KEYDOWN and e.key == pygame.K_UP: forward = True
if e.type == pygame.KEYUP and e.key == pygame.K_DOWN: backward = False
if e.type == pygame.KEYUP and e.key == pygame.K_UP: forward = False
screen.fill((100, 255, 210))
path =4
robot.move(forward, backward, angle, path) #Движение
pos_robot = robot.get_position()
ppos = position(pos_robot[0], -(pos_robot[1]), real_alige(angle, 1), 70)
pf = Platform(ppos[0], -ppos[1])
entities.add(pf)
platforms.append(pf)
robot.render(screen, (ppos[0], ppos[1]), angle) #Поворот
for e in entities:
screen.blit(e.image, camera.apply(e))
camera.update(robot)
pygame.display.update()
clok.tick(30) Средний
Средний



