

move(QGuiApplication::screens().at(0)->geometry().bottom() - frameGeometry().bottom());#define button_breath_pin 3
#include "GyverMotor.h"
GMotor motor(DRIVER3WIRE, 7, 8, 9, HIGH);
// кнопка режим 1
boolean butt_breath;
boolean butt_flag = 0;
long mytime = 2000;
//блок таймера и цикла режим 1
long time_work;
int tester = 3;
void setup() {
pinMode(button_breath_pin, INPUT_PULLUP);
Serial.begin(9600);
motor.setLevel(HIGH);
motor.setMode(FORWARD);
}
void loop() {
butt_breath = !digitalRead(button_breath_pin);
// блок включения режим 1
if (butt_breath == 1 && butt_flag == 0) {time_work = millis(); tester = 1; Serial.println("start"); motor.setSpeed(255); butt_flag = 1;}
if (digitalRead(3)==HIGH && butt_flag == 1) {tester = 3;Serial.println("stop"); motor.setSpeed(0); butt_flag = 0;}
// блок включения режим 1
// цикл режим 1
if (tester == 1 && millis() - time_work > mytime) {
time_work = millis();
tester = 0;
Serial.println("step1");
motor.setSpeed(0);
}
if (tester == 0 && millis() - time_work > mytime) {
time_work = millis();
tester = 1;
Serial.println("step2");
motor.setSpeed(255);
}
// цикл режим 1
}
if (tester==1 && millis() - time_work >= 5000)#define button_one 3
#include "GyverMotor.h"
GMotor motor(DRIVER3WIRE, 7, 8, 9, HIGH);
unsigned long time_work;
int tester = 4;
boolean butt_breath;
void setup() {
Serial.begin(9600);
pinMode(button_one, INPUT_PULLUP);
motor.setLevel(HIGH);
//motor.setSmoothSpeed(40);
// ключ на старт!
motor.setMode(FORWARD);
//motor.setMinDuty(50);
}
void loop() {
butt_breath = !digitalRead(button_one);
if (butt_breath==1) {
motor.setSpeed(255);
tester = 1;
Serial.println((String)"start: "+tester);
}
if (butt_breath==0) {
motor.setSpeed(0);
}
if (tester==1 && millis() - time_work >= 5000) {
time_work = millis();
motor.setSpeed(0);
tester = 1;
Serial.println((String)"stop: "+tester);
}
}#define button_one 3
#include "GyverMotor.h"
GMotor motor(DRIVER3WIRE, 7, 8, 9, HIGH);
unsigned long time_work;
int tester = 1;
void setup() {
Serial.begin(9600);
//pinMode(button_one, INPUT_PULLUP);
motor.setLevel(HIGH);
//motor.setSmoothSpeed(40);
// ключ на старт!
motor.setMode(FORWARD);
//motor.setMinDuty(50);
}
void loop() {
if (tester == 1 && millis() - time_work > 5000) {
time_work = millis();
tester = 0;
Serial.println("step1");
motor.smoothTick(255);
}
if (tester == 0 && millis() - time_work > 5000) {
time_work = millis();
tester = 1;
Serial.println("step2");
motor.smoothTick(0);
}
}uint32_t now = millis();
int tester = 0;
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
if (tester == 0) {
tester = 1;
while (millis() - now <= 60000) {
digitalWrite(LED_BUILTIN, HIGH);
delay(300);
digitalWrite(LED_BUILTIN, LOW);
delay(300);
}
now = millis();
}
if (tester == 1) {
tester = 0;
while (millis() - now <= 60000) {
digitalWrite(LED_BUILTIN, HIGH);
delay(2000);
digitalWrite(LED_BUILTIN, LOW);
delay(2000);
}
now = millis();
}
}if($('#animate').css('left') < '150px') {
$(".animate").css("left", st + offset.left);
}else {
$("animate").css("left", "150px");
}var offset = $(".animate").offset();
console.log(offset.left);
$(window).scroll(function(event) {
var st = $(this).scrollTop();
$(".animate").css("left", st + offset.left);
if ($(".animate").css('left') == '150px') {
alert("150px");
}
});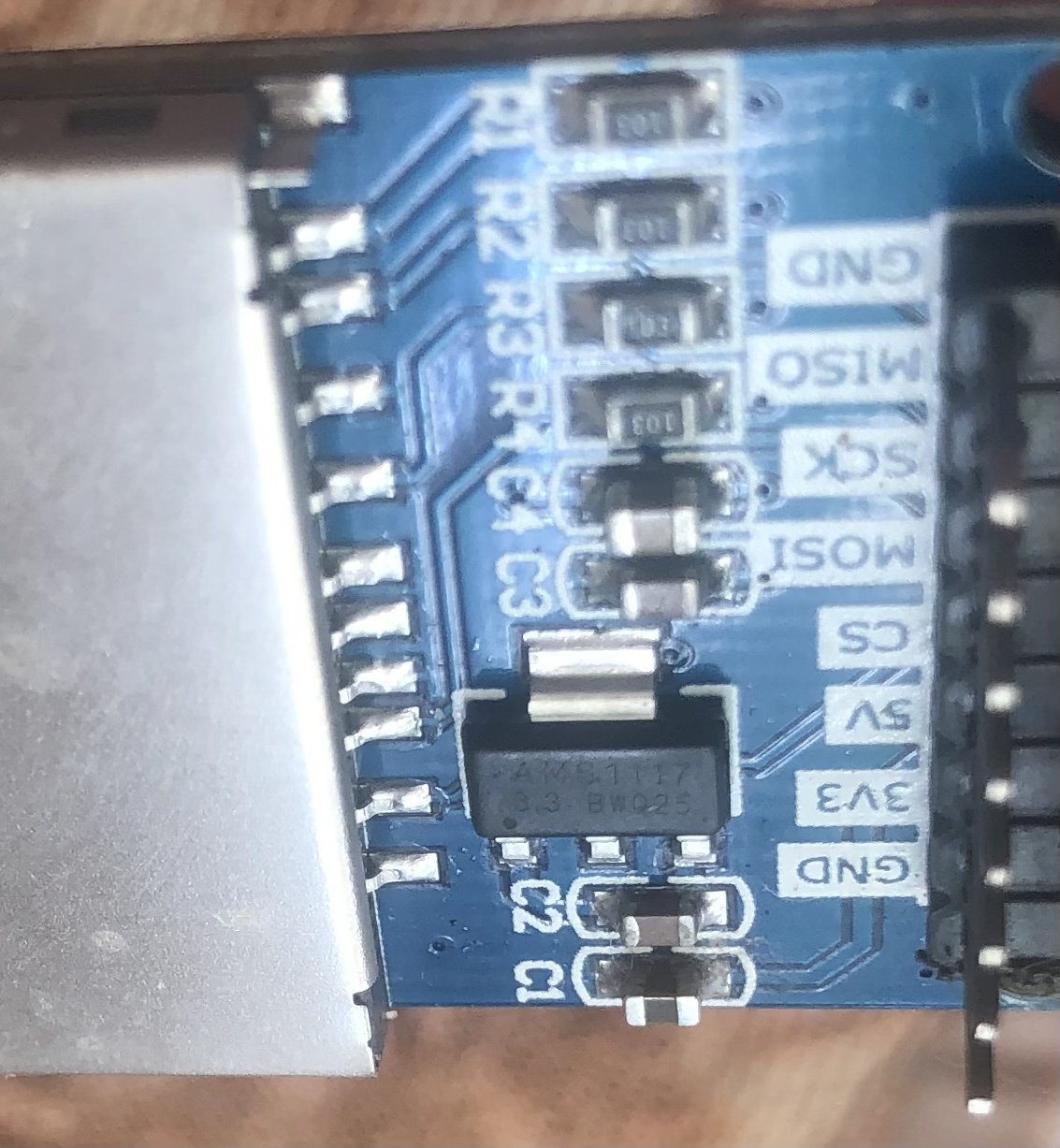
Откопал вот такую небольшую плату в корпусе от китайцев, разобрал, пропаял просто как sd, протестил все ок. Но когда начал паять с той платформой, данные не видит. Куда мне подавятся?